近期,学院研究团队在无人机自主导航领域取得重要研究进展。针对三维动态环境中轨迹规划面临的复杂性与不确定性问题,团队提出了一种新颖的自适应人工势场方法,实现了在动态环境下安全、高效且具有良好鲁棒性的实时轨迹规划。相关成果已发表于机器人与自动化领域国际期刊《IEEE Robotics and Automation Letters》。
该论文以南昌大学信息工程学院为第一完成单位,硕士研究生王昱东为第一作者,武和雷教授为通讯作者,研究获国家自然基金项目资助。
无人机自主导航是其执行搜救、物流运输与环境勘测等复杂任务的重要基础。相较于传统二维静态环境,三维动态环境具有更高的不确定性与复杂性,例如障碍物运动行为难以准确建模、环境变化频繁导致重规划需求显著增加等。针对上述挑战,现有方法在计算效率与系统鲁棒性之间往往难以兼顾,从而限制了其在实际复杂场景中的应用效果。
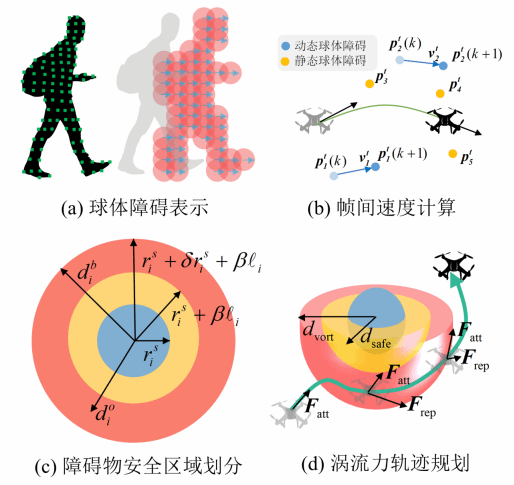
图1 算法核心部分可视化图
针对上述问题,研究团队从环境建模与路径规划两个层面开展创新。在环境建模方面,提出了一种轻量化球形障碍物表示方法,如图1(a)-(b)所示,将传统稠密点云数据转化为结构紧凑的稀疏球体表达,并结合障碍物运动估计,实现对动态环境的轻量化建模。在路径规划方面,设计自适应人工势场方法,通过改进终点加速吸引力、三维涡旋斥力(图1d)以及紧急偏转机制,有效避免传统方法易陷入局部最优的问题。同时,进一步提出自适应路径优化策略,可根据环境变化动态调整规划参数,在保证路径可达性的同时提升避障安全性与计算效率。
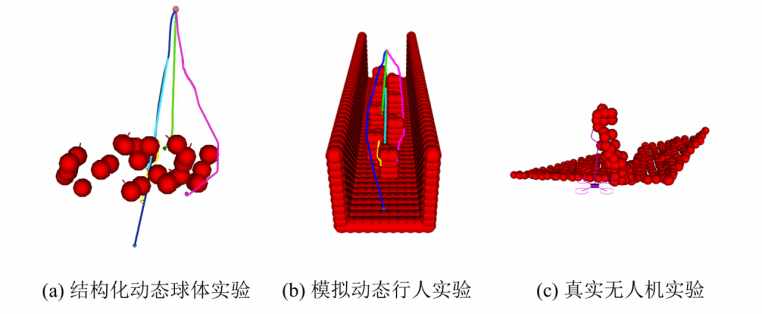
图2 实验结果可视化图
实验结果表明,该方法在多种复杂动态场景中均表现出优势。在动态球体障碍环境中,算法成功率达到87.0%,优于对比方法(次优方法为48.6%),同时平均最小安全距离提升至1.11 m;在更复杂的动态行人环境中,成功率进一步提升至91.2%。在真实无人机实验中,系统规划时间约为150 ms,满足实时性要求,并在安全性与路径可达性方面均优于现有方法。上述结果验证了该研究在无人机三维动态环境自主导航领域的应用潜力与工程价值。
论文链接:https://doi.org/10.1109/lra.2025.3634904